





LiBackpack 50背包激光雷达扫描系统
LiBackpack 50背包激光雷达扫描系统是由数字绿土自主研发的背包式室内外体化激光雷达扫描系统,结合激光雷达和同步定位与地图构建(SLAM)技术,无需GPS(GNSS)即可实时获取周围环境的高度三维点云数据。可用于室内外体化测量、地下空间信息获取、隧道工程、数字工厂、数字矿山、林业资源普查、 BIM、建筑立面测量等领域。

产品优势
易操作:自动化程度高,开机即用
低成本:无需GPS,成本大幅度降低
高度:结合激光雷达和SLAM算法实现室内外体化测量,无需GNSS信号即可实现厘米数据度
查看简洁方便:数据在平板等移动端实时显示;支持无线/有线方式查看数据;数据传输稳定性强,边采集边查看
率:实时显示高度点云数据、支持在线闭环以及闭环优化,扫描完成即可导出采集点云数据和运动轨迹
设计轻巧便捷,可搭载不同的移动平台,无论是手持、步行、骑行、车载都可以轻松采集数据
技术参数
| 系统参数 | |||
| 尺寸(mm) | 850 X 250 X 160 | 电池 | 5700mAh |
| 重量 | 5.8kg | 工作时间 | ~2h(块电池) |
| 功率 | 70W | 端口 | HDMI,USB,网口 |
| 电压 | 22V | 存储 | 512G SSD |
| 电流 | 3.2A | 适用环境 | 室内和室外 |
| 控制及显示 | 网络控制和显示(平板电脑);有线数据传输(平板电脑) | ||
| 传感器参数 | |||
| LiDAR 传感器 | VLP16 | ||
| LiDAR度 | ±3cm | ||
| 垂直视场角 | -15°~15° | ||
| 测量范围 | 100m | ||
| 数据成果 | |||
| 数据度 | ~ 5cm | ||
| 点云格式 | las,ply | ||
LiBackpack 50 尤其适用在有丰富三维结构的环境中,如室内建筑物、室外 林区、居民地等。
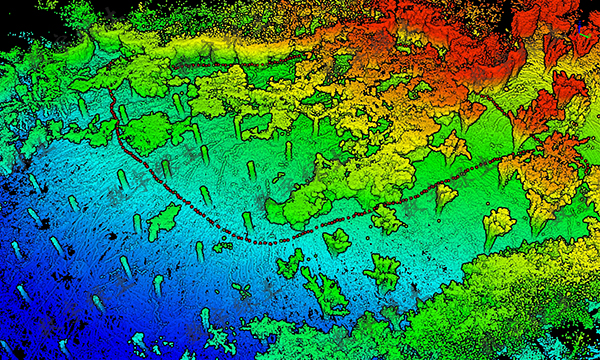
林区扫描 ↑
用LiBackpack 50沿规划路线快速获取林区的三维激光点云数据,可以统计树木的胸径、材积、郁闭度等信息。
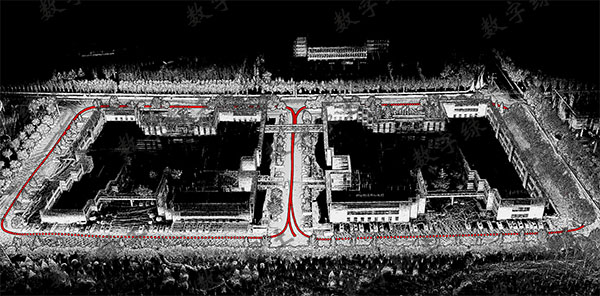
室外扫描 ↑
用LiBackpack 50沿规划路线,获取区域的三维激光点云,可以生产DLG、建筑物立面图、计算建筑面积等。
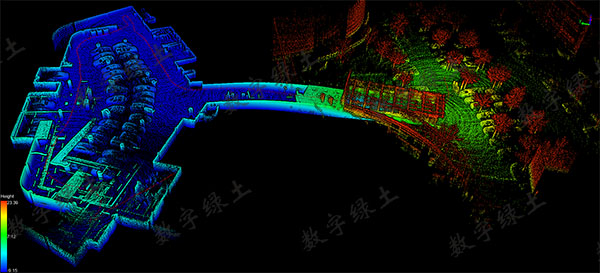
地下车库扫描 ↑
用LiBackpack 50沿规划路线,快速获取地下车库的高度三维激光点云数据,可以生产DLG、地下车库三维模型、统计车位数量等。
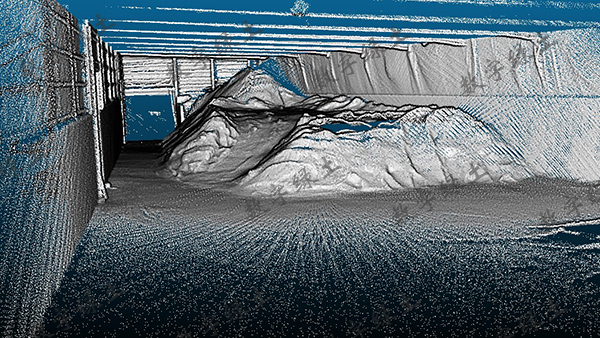
工地扫描 ↑
用LiBackpack 50沿规划路线,获取工地的激光三维点云,可以测量工地堆积物土方量,如煤堆、矿石堆等,也可以测量工地挖方等数据。
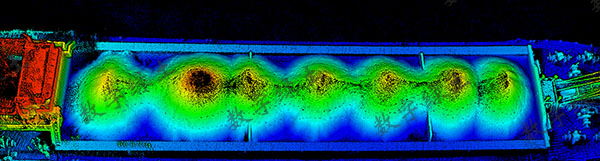
运沙船 ↑
用LiBackpack 50沿着船体外沿快速获取运沙船的高度三维激光点云数据。通过对每艘船只扫描次空船建立空船数据库,船体满载时,同样的方法对满沙船进行扫描,结合两次扫描数据,即可计算出船载泥沙土方量。

 点击交流
点击交流